Undergraduate Research in the IVILAB
The Interdisciplinary Visual Intelligence group has an active program for involving undergraduates in research. We strongly encourage capable and interested undergraduate students to become involved with research early on. Doing so is becoming increasingly critical for preparing for grad school and has also helped many students get jobs in industry.
Link to current opportunities and the application process.
Due to overwhelming interest in the IVILAB we need to limit the number undergraduate researchers. Unfortunately, we have to turn away many undergraduates looking for research experience.
Publishing (needs updating).
Undergraduate researchers working with IVI lab have a great record of contributing sufficiently to research projects that they become authors on papers. So far, twelve undergraduates have been authors on nineteen vision lab papers and three abstracts (needs updating). Click here for the list.
IVILAB undergraduate researchers past and present (needs updating).
Students who have participated in the IVILAB as undergraduates include Matthew Johnson (honor's student, graduated December 2003), Abin Shahab (honor's student, graduated May 2004), Ekaterina (Kate) Taralova (now at CMU), Juhanni Torkkola (now at Microsoft), Andrew Winslow (now at Tufts), Daniel Mathis, Mike Thompson, Sam Martin, Johnson Truong (now at SMU), Andrew Emmott (headed to Oregon State), Ken Wright, Steve Zhou, Phillip Lee, James Magahern, Emily Hartley, Steven Gregory, Bonnie Kermgard, Gabriel Wilson, Alexander Danehy, Daniel Fried, Joshua Bowdish, Lui Lui, Ben Dicken, Haziel Zuniga, Mark fischer, Matthew Burns, Racheal Gladysz, Salika Dunatunga (honors, now at U. Penn), Kristle Schulz (honors), and Soumya Srivastava.
Examples of undergraduate research in the IVILAB (needs updating)
Understanding Scene Geometry
 The image(*) to the right shows undergraduate Emily Hartley determining the
geometry of an indoor scene and the parameters of the camera that took the
picture of the scene. Such data is
critical for both training and validating systems that automatically infer scene
geometry, the camera parameters, the objects within the scene, and their
location and pose.
The image(*) to the right shows undergraduate Emily Hartley determining the
geometry of an indoor scene and the parameters of the camera that took the
picture of the scene. Such data is
critical for both training and validating systems that automatically infer scene
geometry, the camera parameters, the objects within the scene, and their
location and pose.
![]() Funding for undergraduates provided by REU supplement to NSF
CAREER
grant IIS-0747511.
Funding for undergraduates provided by REU supplement to NSF
CAREER
grant IIS-0747511.
(*) Photo credit Robert Walker Photography.
Semantically Linked Instructional Content (SLIC)
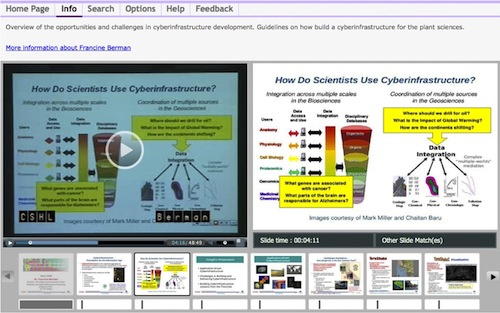 The image shows a screen shot of the SLIC educational video browsing system which
is an excellent project for undergraduates interested in multimedia and web design.
For more information see the
SLIC project page,
or contact
Yekaterina (Kate) Kharitoova
(ykk AT email DOT arizona DOT edu) for more
information. SLIC has led to several publications with undergraduate authors,
and currently several undergraduate students are working on it.
The image shows a screen shot of the SLIC educational video browsing system which
is an excellent project for undergraduates interested in multimedia and web design.
For more information see the
SLIC project page,
or contact
Yekaterina (Kate) Kharitoova
(ykk AT email DOT arizona DOT edu) for more
information. SLIC has led to several publications with undergraduate authors,
and currently several undergraduate students are working on it.
![]() SLIC is partly supported by NSF grant EF-0735191.
SLIC is partly supported by NSF grant EF-0735191.
Aligning image caption words with image elements
There are now millions of images on-line with associated text (e.g., captions). Information in captions is either redundant (e.g., the word dog occurs, and the dog is obvious) or complementary (e.g., there is sky above the dog, but it is not mentioned). Redundant information allows us to train machine learning methods to predict one of these modalities from the other. Alternatively, complementary information in the modalities can disambiguate uncertainty (see "Word Sense Disambiguation with Pictures" below), or provide for combined visual and textual searching and data mining. Under the guidance of PHD student Luca del Pero, undergraduates Phil Lee, James Magahern, and Emily Hartley have contributed to research on using object detectors to improve the alignment of natural language captions to image data, which has already led to a publication for them. For more information on this project, contact Luca del Pero (delpero AT cs DOT arizona DOT edu).
![]()
![]() Funding for undergraduates provided by
ONR and
REU supplement to NSF
CAREER
grant IIS-0747511.
Funding for undergraduates provided by
ONR and
REU supplement to NSF
CAREER
grant IIS-0747511.
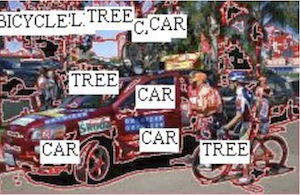
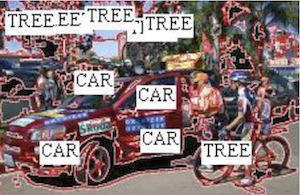 On the left is the baseline result; the image on the right shows the result with detectors.
On the left is the baseline result; the image on the right shows the result with detectors.
Simultaneously tracking many objects with applications to biological growth
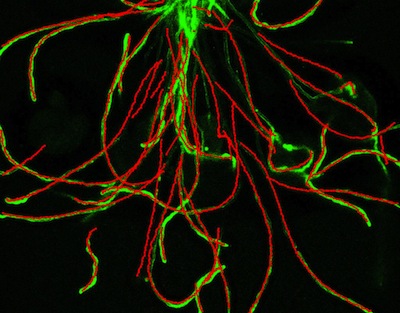 Simultaneously tracking many objects with overlapping trajectories is hard
because you do not know which detections belong to which objects. The vision lab
has developed a new approach to this problem and has applied it to several kinds
of data. For example, the image to the right shows tubes that are growing out of
pollen specs (not visible) towards ovules (out of the picture) in an
Simultaneously tracking many objects with overlapping trajectories is hard
because you do not know which detections belong to which objects. The vision lab
has developed a new approach to this problem and has applied it to several kinds
of data. For example, the image to the right shows tubes that are growing out of
pollen specs (not visible) towards ovules (out of the picture) in an
This project is in collaboration with the Palanivelu lab.
![]() Funding for this project provided by NSF grant IOS-0723421.
Funding for this project provided by NSF grant IOS-0723421.
Identifying machine parts using CAD models
 CAD models provide the 3D structure of many man made objects such as machine
parts. This projects aims to find objects in images based on these models.
However, since the data is most readily available as triangular meshes, 3D
features that are useful for matching 2D images must be extracted from mesh
data. Undergraduate Emily Hartley has contributed software for this task, and
undergraduate Andrew Emmott has contributed software for matching extracted 3D
features to 2D images. They have been mentored by PHD student
Luca del Pero.
For more information, contact
him (delpero AT
cs DOT arizona DOT edu).
CAD models provide the 3D structure of many man made objects such as machine
parts. This projects aims to find objects in images based on these models.
However, since the data is most readily available as triangular meshes, 3D
features that are useful for matching 2D images must be extracted from mesh
data. Undergraduate Emily Hartley has contributed software for this task, and
undergraduate Andrew Emmott has contributed software for matching extracted 3D
features to 2D images. They have been mentored by PHD student
Luca del Pero.
For more information, contact
him (delpero AT
cs DOT arizona DOT edu).
![]() Funding for undergraduates provided by
NSF Grant 0758596 and
REU supplement to NSF
CAREER
grant IIS-0747511.
Funding for undergraduates provided by
NSF Grant 0758596 and
REU supplement to NSF
CAREER
grant IIS-0747511.
Inferring Plant Structure from Images
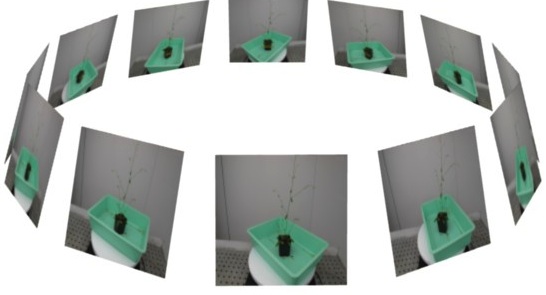 Quantifying plant geometry is critical for understanding how subtle details in
form are caused by molecular and environmental changes. Developing automated
methods for determining plant structure from images is motivated by the
difficulty of extracting these details by human inspection, together with the
need for high throughput experiments where we can test against a large number of
variables.
Quantifying plant geometry is critical for understanding how subtle details in
form are caused by molecular and environmental changes. Developing automated
methods for determining plant structure from images is motivated by the
difficulty of extracting these details by human inspection, together with the
need for high throughput experiments where we can test against a large number of
variables.
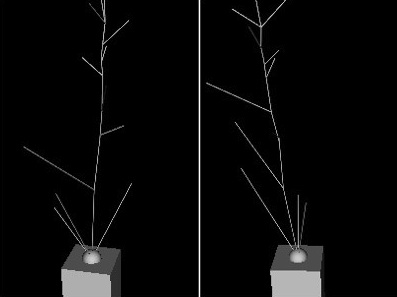
To get numbers for structure we fit geometric
models of plants to image data. The picture on the right shows multiple views of
an Arabidopsis plant (top), two views (bottom, left), and fits of the skeleton
to the image data, projected using camera models corresponding to those two
views. Undergraduates Sam Martin and Emily Hartley have helped collect the
image data, arrange feature extraction, and create ground truth data fits to it
for training and evaluation. This project is led by
Kyle Simek.
For more information, contact him
(ksimek AT cs DOT arizona DOT edu).

This project is in collaboration with the Palanivelu and Wing labs.
![]() Funding for undergraduates provided by
the NSF funded
iPlant
project, via
the University of Arizona UBRP program
and
an REU supplement to NSF
CAREER
grant IIS-0747511.
Funding for undergraduates provided by
the NSF funded
iPlant
project, via
the University of Arizona UBRP program
and
an REU supplement to NSF
CAREER
grant IIS-0747511.
Modeling and visualizing Alternaria
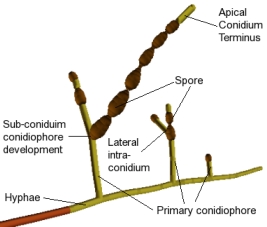 To the right is a labeled model of the fungus Alternaria generated by a
stochastic L-system built by undergraduate researcher
Kate Taralova.
For more information, follow this
link.
To the right is a labeled model of the fungus Alternaria generated by a
stochastic L-system built by undergraduate researcher
Kate Taralova.
For more information, follow this
link.
This project is in collaboration with the Pryor lab.
![]() Support for undergraduates provided by TRIFF and a REU supplement to a
department of computer science NSF research infrastructure grant
Support for undergraduates provided by TRIFF and a REU supplement to a
department of computer science NSF research infrastructure grant
Inactive and Subsumed Projects
Word sense disambiguation with pictures
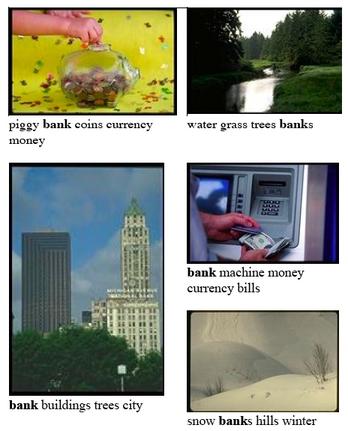 Many words in natural language are ambiguous as illustrated here by the word
"bank". Typically, resolving such ambiguity is attempted by looking at nearby
words in the passage. Computer vision lab undergraduate researcher Matthew Johnson played a key role in
the development of a novel method for adding information from accompanying
illustrations to help reduce the ambiguity. The system learns from a data base
of images that certain word senses (e.g., meanings of bank found with outdoor
photos), are associated with certain kinds of image features. This association
is then used to incorporate information in illustrations to help disambiguate
the word under consideration. This work led to two publications for Matthew.
Many words in natural language are ambiguous as illustrated here by the word
"bank". Typically, resolving such ambiguity is attempted by looking at nearby
words in the passage. Computer vision lab undergraduate researcher Matthew Johnson played a key role in
the development of a novel method for adding information from accompanying
illustrations to help reduce the ambiguity. The system learns from a data base
of images that certain word senses (e.g., meanings of bank found with outdoor
photos), are associated with certain kinds of image features. This association
is then used to incorporate information in illustrations to help disambiguate
the word under consideration. This work led to two publications for Matthew.
![]() Support for undergraduates provided by
TRIFF and a
REU supplement to a department of computer science NSF research infrastructure
grant.
Support for undergraduates provided by
TRIFF and a
REU supplement to a department of computer science NSF research infrastructure
grant.
Vision system for flying robots
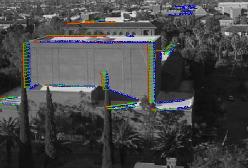

 These three images illustrate work by computer science students on
a UA multi-department effort to compete in international aerial robotics
competition which is largely an event for undergraduates. Here computer
controlled planes and/or helicopters work towards accomplishing a mission
specified by the contest organizers. Part of the current task is to find a
building having a particular symbol on it (left), and identify the doors and
windows of that building, and then identify which doors and windows are open so
that a sub-vehicle can be launched through the portal. The middle figure shows
the symbol identification software being tested from a moving vehicle to
simulate flight. The far right figure shows a view from the computer science
department with lines found in this image and the matching lines found in a
companion image. The students use the shift (shown in green) between matching
edges to estimate the distance to the edge, which is used to help analyze the
structures. Images provided by undergraduate researcher
Ekaterina (Kate) Taralova (now at CMU).
These three images illustrate work by computer science students on
a UA multi-department effort to compete in international aerial robotics
competition which is largely an event for undergraduates. Here computer
controlled planes and/or helicopters work towards accomplishing a mission
specified by the contest organizers. Part of the current task is to find a
building having a particular symbol on it (left), and identify the doors and
windows of that building, and then identify which doors and windows are open so
that a sub-vehicle can be launched through the portal. The middle figure shows
the symbol identification software being tested from a moving vehicle to
simulate flight. The far right figure shows a view from the computer science
department with lines found in this image and the matching lines found in a
companion image. The students use the shift (shown in green) between matching
edges to estimate the distance to the edge, which is used to help analyze the
structures. Images provided by undergraduate researcher
Ekaterina (Kate) Taralova (now at CMU).
Browsing large image collections
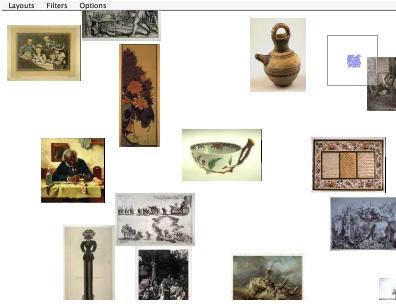 A screen shot of a program for browsing large digital art image databases that
is being developed by undergraduate students in computer science at the U of A.
(Art images courtesy of the Fine Arts Museum of San Francisco).
Contributions to this project have been made by undergraduates
Matthew Johnson and John Bruce.
A screen shot of a program for browsing large digital art image databases that
is being developed by undergraduate students in computer science at the U of A.
(Art images courtesy of the Fine Arts Museum of San Francisco).
Contributions to this project have been made by undergraduates
Matthew Johnson and John Bruce.
Evaluation of image segmentation algorithms
 Two images which have been segmented by three different methods. U of A
undergraduate students in computer science are involved in research to evaluate
the quality of such methods. Segmentation quality is quantified by the degree to
which the regions are useful to programs which automatically recognize what is
in the images. Contributions have been made by Abin Shahab.
Two images which have been segmented by three different methods. U of A
undergraduate students in computer science are involved in research to evaluate
the quality of such methods. Segmentation quality is quantified by the degree to
which the regions are useful to programs which automatically recognize what is
in the images. Contributions have been made by Abin Shahab.